Using Vision for Pre- and Post-Grasping Object Localization for Soft Hands
PEOPLE
ABSTRACT
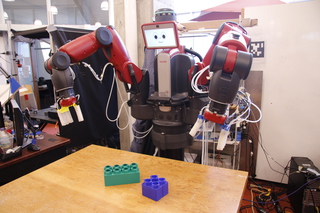
In this paper, we present soft hands guided by an RGB-D object perception algorithm which is capable of localizing the pose of an object before and after grasping. The soft hands can perform manipulation operations such as grasping and connecting two parts. The flexible soft grippers grasp objects reliably under high uncertainty but the poses of the objects after grasping are subject to high uncertainty. Visual sensing ameliorates the increased uncertainty by means of in-hand object localization. The combination of soft hands and visual object perception enables our Baxter robot, augmented with soft hands, to perform object assembly tasks which require high precision. The effectiveness of our approach is validated by comparing it to the Baxter's original hard hands with and without the in-hand object localization.
PUBLICATIONS
, Joseph DelPreto, Daniela Rus, “Using Vision for Pre- and Post-grasping Object Localization for Soft Hands,” in Proceedings of International Symposium on Experimental Robotics (ISER), Tokyo, Japan, Oct, 2016. [ pdf | slides ]