RGB-D Edge Detection and Registration
PEOPLE
ABSTRACT
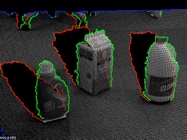
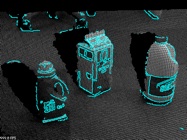
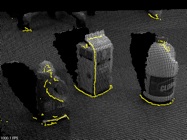
We present a 3D edge detection approach for RGB-D point clouds and its application in point cloud registration. Our approach detects several types of edges, and makes use of both 3D shape information and photometric texture information. Edges are categorized as occluding edges, occluded edges, boundary edges, high-curvature edges, and RGB edges. We exploit the organized structure of the RGB-D image to efficiently detect edges, enabling near real-time performance. We present two applications of these edge features: edge-based pair-wise registration and a pose-graph SLAM approach based on this registration, which we compare to state-of-the-art methods. Experimental results demonstrate the performance of edge detection and edge-based registration both quantitatively and qualitatively.
VIDEOS
PUBLICATIONS
, Alexander J. B. Trevor, Henrik I. Christensen, “RGB-D Edge Detection and Edge-based Registration,” in Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo Big Sight, Japan, 2013. [ pdf ]