Multi-robot assembly
PEOPLE
ABSTRACT
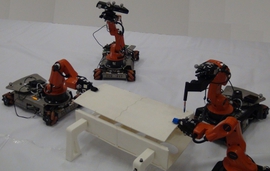
We present a system in which a flexible team of robots coordinates to assemble large, complex, and diverse structures autonomously. Our system operates across a wide range of spatial scales and tolerances, using a hierarchical perception architecture. For the successful execution of very precise assembly operations under initial uncertainty, our system starts with high-field of view but low accuracy sensors, and gradually uses low field-of-view but high accuracy sensors. Our system also uses a failure detection and recovery system, integrated with this hierarchical perception architecture: upon losing track of a feature, our system retracts to using high-field of view systems to re-localize. Additionally, we contribute manipulation skills and tools necessary to assemble large structures with high precision. First, the team of robots coordinates to transport large assembly parts which are too heavy for a single robot to carry. Second, we develop a new tool which is capable of co-localizing holes and fasteners for robust insertion and fastening. We present real robot experiments where we measure the contribution of the hierarchical perception and failure recovery approach to the robustness of our system. We also present an extensive set of experiments where our robots successfully insert all 80 of the attempted fastener insertion operations.
PUBLICATIONS
Mehmet Dogar, Ross A. Knepper, Andrew Spielberg, , Henrik I. Christensen, Daniela Rus, “Multi-Scale Assembly with Robot Teams,” International Journal of Robotics Research (IJRR), Jul. 2015. [ abstract | pdf ]
Mehmet Dogar, Ross A. Knepper, Andrew Spielberg, , Henrik I. Christensen, Daniela Rus, “Towards Coordinated Precision Assembly with Robot Teams,” in Proceedings of International Symposium on Experimental Robotics (ISER), Marrakech and Essaouira, Morocco, 2014. [ pdf ]